05. 旋转门#
首先我们需要给出以矩阵作为指数的自然指数函数的定义: $\(e^A \equiv I + A + \frac{1}{2!}A^2 + \frac{1}{3!}A^3 + \cdots\)$
引理: 如果 \(A^2 = I\),那么有 $\(e^{i\theta A} = \cos\theta I + i\sin\theta A\)$
Proof:
下面给出三个旋转门: $$
其中 \(\vec{n} = (n_x, n_y, n_z) \in \mathbb{R}^3, n_x^2 + n_y^2 + n_z^2 = 1\),\(\vec{\sigma} = (\sigma_1, \sigma_2, \sigma_3) = (X, Y, Z)\)。
该旋转算子可以生成任意的单量子比特旋转\(U\)(相差一个全局相位)。从某种意义上说,给定任何的\(U\),人们总是可以选择角度\(\theta\)和旋转轴\(\hat{n}\),使得 $\( U=e^{i\alpha}R_n(\theta) \)$
Lemma: \(\vec{n}\cdot \vec{\sigma}\) 的特征值是 \(\pm 1\).
Proof:
Theorem: \(R_{\vec{n}}(\theta)\) 的作用效果是在Bloch球中以 \(\vec{n}\) 为轴旋转 \(\theta\) 。
Proof:
因为 \(\vec{n} \cdot \vec{\sigma}\) 的特征值是 \(\pm 1\),不妨设 \(+1\) 对应的特征向量是 \(|a\rangle\),\(-1\) 对应的特征向量是 \(|b\rangle\),那么根据谱分解定理,我们有 $\(\vec{n} \cdot \vec{\sigma} = \sum_i \lambda_i |i\rangle \langle i| = |a\rangle \langle a| - |b\rangle \langle b|\)$
对于任意单位向量 \(|\psi\rangle\),将其用 \(\lbrace |a\rangle, |b\rangle\rbrace\) 这一组基表示,忽略全局相位 $$
$$
忽略掉全局相位,在Bloch球中,以 \(|a\rangle, |b\rangle\) 为轴,旋转 \(\alpha\) 角度。
下面我们来使用mindquantum来验证一下旋转效果。
首先我们构建一个线路来实现输入 \(\theta, \phi\) 输出对应的量子态,显然可以从 \(|0\rangle\) 通过两个旋转来实现。
from mindquantum.core.circuit import Circuit
from mindquantum.core.gates import RX, RZ, RY
import numpy as np
circ = Circuit()
circ += RY("theta").on(0)
circ += RZ("phi").on(0)
circ.svg()

API 解释:
RX、RY、RZ是常用的单比特旋转门,使用方法是RX(name/val).on(q),表示声名一个作用在q上的 \(R_x\) 门,如果参数是字符串name则生成一个含参量子门;如果参数是数值val则生成一个具体的量子门。在 MindQuantum 中只要两个参数名是相同的就表示同一个参数。
我们可以验证一下,\(\theta = \frac{\pi}{4}, \phi = 0\) 的点的坐标应该是 \((\frac{1}{\sqrt{2}}, 0, \frac{1}{\sqrt{2}})\)
from mindquantum.io.display import BlochScene
import matplotlib.pyplot as plt
%matplotlib widget
state1 = circ.get_qs(pr={"theta" : np.pi / 4, "phi" : 0})
scene = BlochScene()
fig, ax = scene.create_scene()
state1_obj = scene.add_state(ax, state1)
plt.show()
API 解释:
对于含参量子线路,作用时需要传入具体的参数值。在 MindQuantum 中使用参数解析器 ParameterResolver,可以使用一个字典声名一个参数解析器,字典的结构是
{name: value};对于量子线路也可以调用
circ.get_qs(),表示将该线路作用在 \(|0\rangle\) 上的结果。
现在将它绕 \(z\) 轴旋转 \(\pi \over 3\),旋转后的 \(\theta' = \frac{\pi}{4}, \phi' = \frac{\pi}{3}\),旋转后的坐标为 \((\cos{\frac{\pi}{3}}\sin\frac{\pi}{4}, \sin\frac{\pi}{3}\sin\frac{\pi}{4}, \cos\frac{\pi}{4})\) 。
from mindquantum.core.circuit import Circuit
from mindquantum.core.gates import RX, RZ
from mindquantum.io.display import BlochScene
import numpy as np
%matplotlib widget
t = np.linspace(0, 1, num=100) # 时间片
arr_theta = np.pi / 4 + 0 * t # 每个时间点的 theta
arr_phi = np.pi / 3 * t # 每个时间点的 phi
states = [] # 存储每个时间点的 state
for theta, phi in zip(arr_theta, arr_phi):
states.append(circ.get_qs(pr={"theta": theta, "phi": phi}))
states = np.array(states)
scene = BlochScene()
fig, ax = scene.create_scene()
# 先把 start 和 end 两个点画出来
start = circ.get_qs(pr={"theta": np.pi / 4, "phi": 0})
end = circ.get_qs(pr={"theta": np.pi / 4, "phi": np.pi / 3})
scene.add_state(ax, start, pointcolor="red")
scene.add_state(ax, end, pointcolor="blue")
# 生成动画
state_obj = scene.add_state(ax, states[0], pointcolor="yellow")
anim = scene.animation(fig, ax, state_obj, states)
/Users/jedzhou/miniconda3/envs/py311/lib/python3.11/site-packages/mindquantum/io/display/bloch_plt_drawer.py:533: UserWarning: jupyter environment detected, if animation not work, please install ipympl with '!pip install ipympl' in jupyter notebook and run '%matplotlib ipympl' in cell.
warnings.warn(
API 解释:
scene.add_state添加一个点;
scene.animation生成动画,需要把每个时间点的state数组传入。Bloch 球的颜色等许多参数都可以调节,详细 API 参照 mindquantum.io 。
旋转门的性质(以\(R_z\)门为例)#
\(R_z\)门有以下几个特性: $\( X R_{z}(\theta) X=R_{z}(-\theta)=R_{z}(\theta)^{-1}=R_{z}(\theta)^{\dagger} \)\( 最后的关系式来源于\)R_z(\theta)\(的幺正性。验证一下,\)(Z^\dagger=Z)\( \)\( R_{z}(\theta)^{\dagger}=I \cos \frac{\theta}{2}+i Z \sin \frac{\theta}{2}=e^{i \theta Z / 2} \)$ 第一个关系式也是正确的,有如下两种方式验证:
直接的办法,已知\(R_{z}(\theta)(\alpha|0\rangle+\beta|1\rangle)=\alpha e^{-i \theta / 2}|0\rangle+\beta e^{i \theta / 2}|1\rangle\),则有 $\( \begin{aligned} X R_{z}(\theta) X(\alpha|0\rangle+\beta|1\rangle) &=X R_{z}(\theta)(\alpha|1\rangle+\beta|0\rangle) \\ &=X\left(\alpha e^{i \theta / 2}|1\rangle+\beta e^{-i \theta / 2}|0\rangle\right) \\ &=\alpha e^{i \theta / 2}|0\rangle+\beta e^{-i \theta / 2}|1\rangle \end{aligned} \)\( 然后与\)R_{z}(-\theta)(\alpha|0\rangle+\beta|1\rangle)=\alpha e^{i \theta / 2}|0\rangle+\beta e^{-i \theta / 2}|1\rangle$比较。
“更好”的方法可能是: $\( X R_{z}(\theta) X=X I X \cos \frac{\theta}{2}-i X Z X \sin \frac{\theta}{2}=I \cos \frac{\theta}{2}+i Z \sin \frac{\theta}{2} \)\( 因为我们知道\)X Z X=-Z \(,或 \) Z X+X Z=0 \( 亦或 \) X Z=-X Z$(对于任何泡利矩阵的组合都成立)
Figure from wikipedia
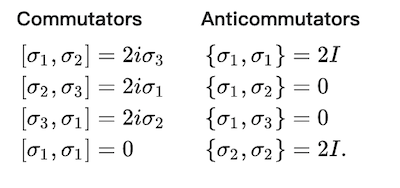
注意到\(XY-YX=2iZ\),这意味着\(XY=iZ\)。两个不同的泡利矩阵相乘与第三个泡利矩阵成正比。
现在让我们在 MindQuantum 中验证上述性质,我们随便选取一个\(\theta\)的值,然后观察\(X R_{z}(\theta) X\)、\(R_{z}(-\theta)\)、\(R_{z}(\theta)^{-1}\)和\(R_{z}(\theta)^{\dagger}\)作用在\(|0\rangle\)态上的结果是否相同。
from mindquantum.core.gates import RZ, X
from mindquantum.core.circuit import Circuit
theta = 1
# X Rz(𝜃) X
circ = Circuit()
circ += X.on(0)
circ += RZ(theta).on(0)
circ += X.on(0)
print(circ)
print(circ.get_qs(ket=True))
┏━━━┓ ┏━━━━━━━┓ ┏━━━┓
q0: ──┨╺╋╸┠─┨ RZ(1) ┠─┨╺╋╸┠───
┗━━━┛ ┗━━━━━━━┛ ┗━━━┛
(0.87758256+0.47942554j)¦0⟩
# Rz(-𝜃)
circ2 = Circuit()
circ2 += RZ(-theta).on(0)
print(circ2)
print(circ2.get_qs(ket=True))
┏━━━━━━━━┓
q0: ──┨ RZ(-1) ┠───
┗━━━━━━━━┛
(0.87758256+0.47942554j)¦0⟩
# inverse of Rz(𝜃)
from mindquantum.core.gates import Power
circ3 = Circuit()
circ3 += Power(RZ(theta), -1).on(0)
print(circ3)
print(circ3.get_qs(ket=True))
┏━━━━━━━━━━┓
q0: ──┨ RZ(1)^-1 ┠───
┗━━━━━━━━━━┛
(0.87758256+0.47942554j)¦0⟩
# Rz(𝜃) with dagger
circ4 = Circuit()
circ4 += RZ(theta).hermitian().on(0)
print(circ4)
print(circ4.get_qs(ket=True))
┏━━━━━━━━┓
q0: ──┨ RZ(-1) ┠───
┗━━━━━━━━┛
(0.87758256+0.47942554j)¦0⟩
可以看到四种方式得到的线路末态完全一致。
from show_info import InfoTable
InfoTable('mindquantum')
| Software | Version |
|---|---|
| mindquantum | 0.11.0 |
| System | Info |
| Python | 3.11.10 |
| OS | Darwin arm64 |
| Memory | 17.18 GB |
| CPU Max Thread | 10 |
| Date | Tue Sep 16 18:00:03 2025 |
习题#
Exercise 1#
写出 \(R_x(\theta), R_y(\theta), R_z(\theta)\) 的矩阵形式。
Exercise 2#
证明 \(XR_y(\theta)X = R_y(-\theta)\)
Exercise 3(选做)#
证明如下等式成立: $\( e^{-i(\theta / 2) n \cdot \sigma}=c_{\theta} I-i s_{\theta}(n \cdot \sigma) \)\( 其中\)n\cdot\sigma\equiv n_x X+n_y Y+n_z Z\(,且\)n_x^2+n_y^2+n_z^2=1$。
Exercise 4(选做)#
证明:给定任意的\(U\),人们总是可以选择角度\(\theta\)和旋转轴\(\hat{n}\),使得 $\( U=e^{i\alpha}R_n(\theta) \)$